Hace no mucho necesite que un programa en escrito en python se ejecutara en una Raspberry Pi al inicio, es decir, ni bien booteara el sistema operativo iniciara el programa. La forma mas adecuada fue hacerlo por medio de systemctl definiendo algunos parámetros. Por supuesto que el programa debe tener algún tipo de bucle que […]
Categoría: Python
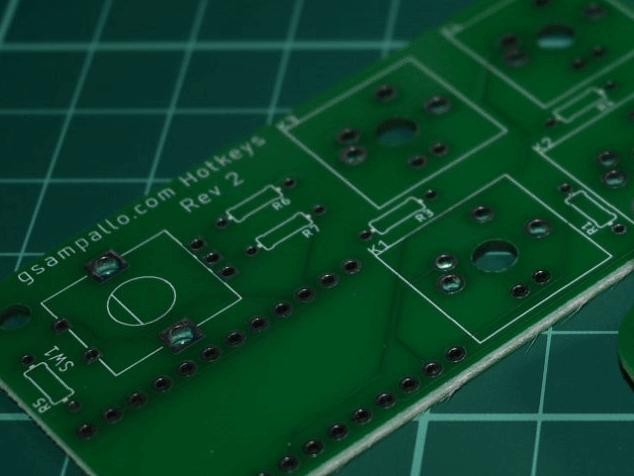
En una entrada anterior comente como trabaja el software de PanoramicCam, pueden encontrarlo aquí. En este punto me quiero enfocar un poco sobre el hardware utilizado, el cual fue auspiciado por DigitSpace, los links de cada uno de los componentes están debajo: ESP32-CAM Motor paso a paso 288yj-48 y el driver PCB experimental Headers condensador […]